GnB Co., Ltd., Korea’s leading manufacturer of industrial robots
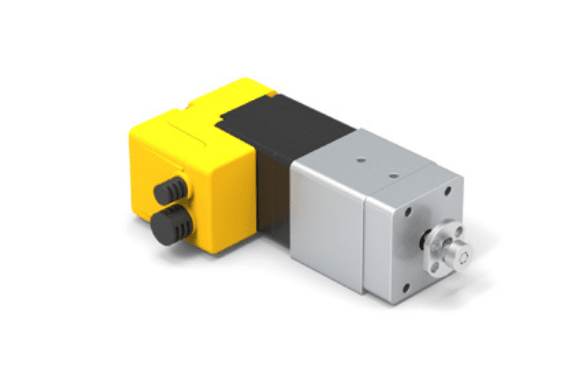
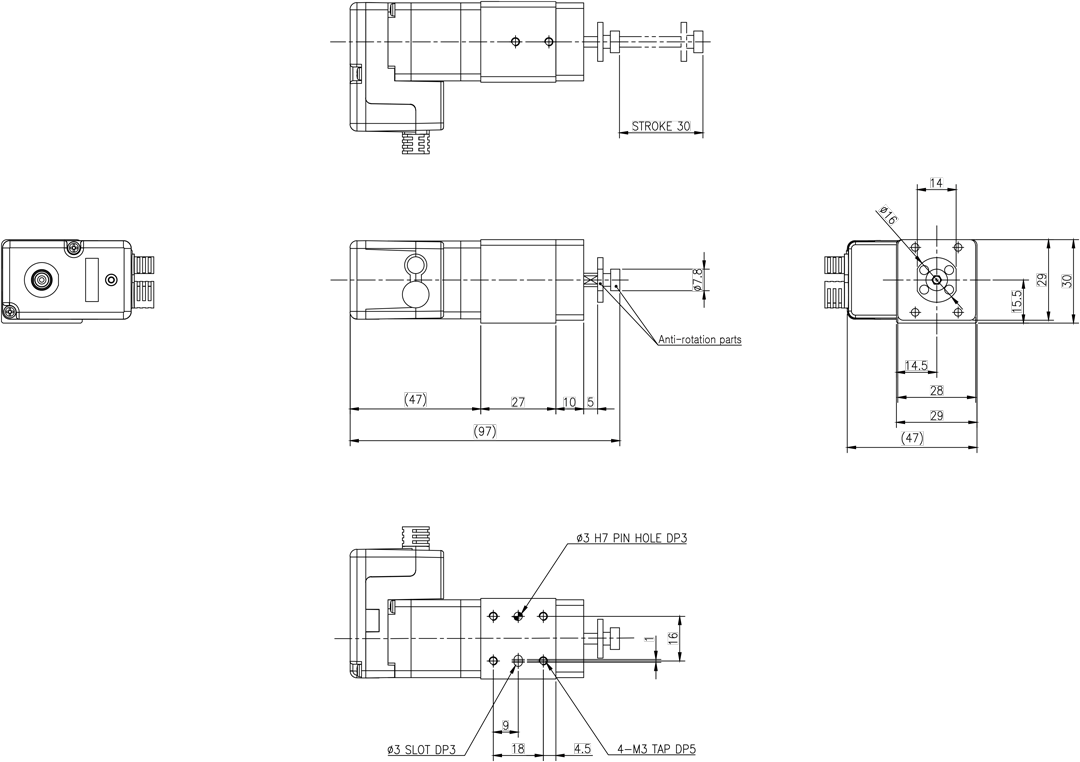
| Rod Diameter Lead | Ø04 x 01 |
|---|---|
| Stroke | 30 mm |
| Max Speed | 34 mm/s |
| Repeatability | ±0.01 mm |
| Surface Flatness | ±0.02 mm |
| Parallelisms | ±0.003 mm |
| Motor(Stepping) | HSE-28MM |
|---|---|
| Sensor | PM-R25, F25 |
| Payload(Hor.) | 1.5 kg |
| Payload(Ver.) | 0.5 kg |
| Pushing force | Less than 6N |
| Robot Color | White |

| Mp | My | Mr |
|---|---|---|
| 5 N·m | 7 N·m | 10 N·m |
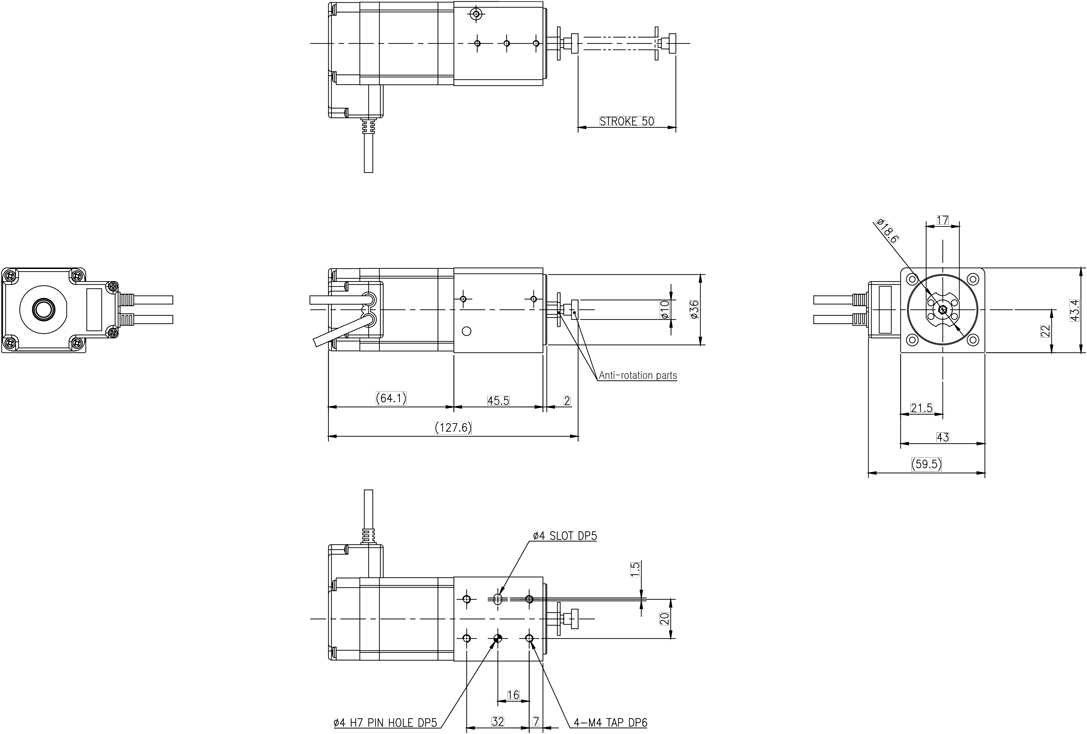
| Rod Diameter Lead | Ø08 x 05 |
|---|---|
| Stroke | 50 mm |
| Max Speed | 150 mm/s |
| Repeatability | ±0.01 mm |
| Surface Flatness | ±0.02 mm |
| Parallelisms | ±0.003 mm |
| Motor(Stepping) | HSE-42L |
|---|---|
| Sensor | PM-R25, F25 |
| Payload(Hor.) | 4 kg |
| Payload(Ver.) | 2 kg |
| Pushing force | Less than 98N |
| Robot Color | White |
| Mp | My | Mr |
|---|---|---|
| 16 N·m | 16 N·m | 50 N·m |
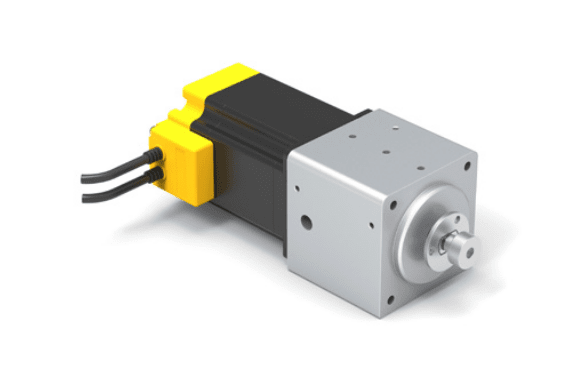
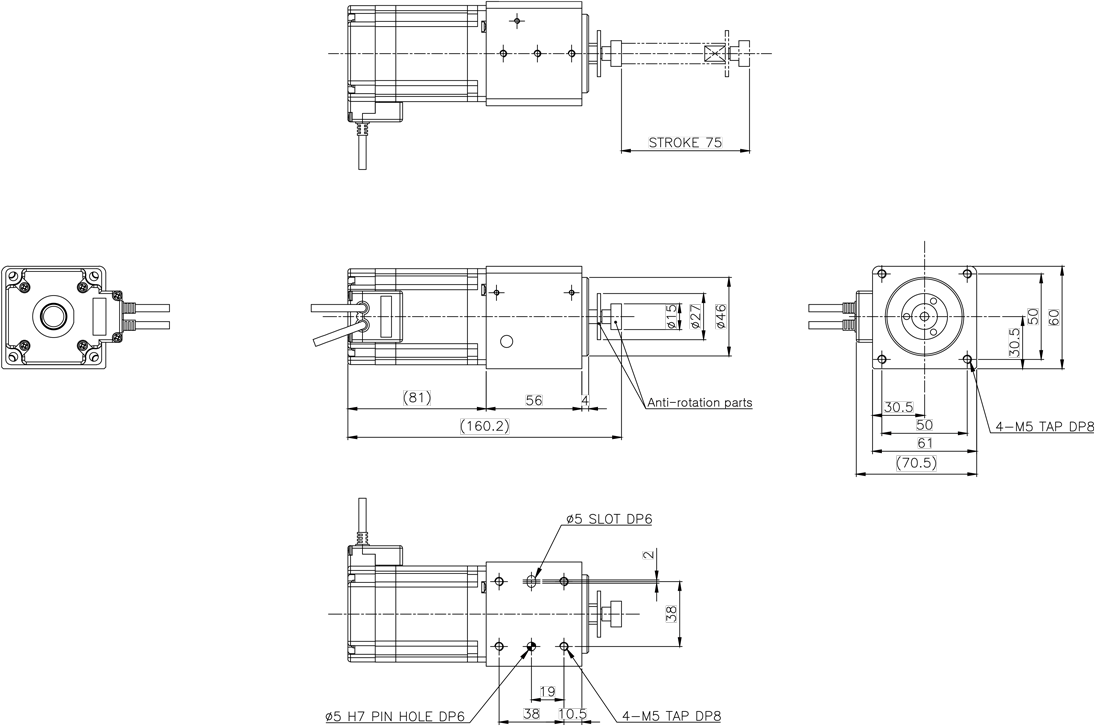
| Rod Diameter Lead | Ø12 x 05 |
|---|---|
| Stroke | 75 mm |
| Max Speed | 150 mm/s |
| Repeatability | ±0.01 mm |
| Surface Flatness | ±0.02 mm |
| Parallelisms | ±0.003 mm |
| Motor(Stepping) | HSE-56M |
|---|---|
| Sensor | PM-R25, F25 |
| Payload(Hor.) | 10 kg |
| Payload(Ver.) | 5 kg |
| Pushing force | Less than 240N |
| Robot Color | White |
| Mp | My | Mr |
|---|---|---|
| 36 N·m | 36 N·m | 200 N·m |